STM32的USART简介
通用同步异步收发器(Universal Synchronous Asynchronous Receiver and Transmitter)是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换。有别于USART还有一个UART(Universal Asynchronous Receiver and Transmitter),它是在USART基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是UART。
串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。USART就是对这些传输参数有具体规定,当然也不是只有唯一一个参数值,很多参数值都可以自定义设置,只是增强它的兼容性。
协议层
串口通讯的数据包由发送设备通过自身的TXD接口传输到接收设备的RXD接口。在串口通讯的协议层中,规定了数据包的内容, 它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据

波特率
常见的波特率为4800、9600、115200等
有效数据
在数据包的起始位之后紧接着的就是要传输的主体数据内容,也称为有效数据,有效数据的长度常被约定为5、6、7或8位长。
数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)以及无校验(noparity)。
奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个8位长的有效数据为:01101001,此时总共有4个“1”,为达到奇校验效果,校验位为“1”,最后传输的数据将是8位的有效数据加上1位的校验位总共9位。
偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧:11001010,此时数据帧“1”的个数为4个,所以偶校验位为“0”。
0校验是不管有效数据中的内容是什么,校验位总为“0”,1校验是校验位总为“1”。
USART功能框图
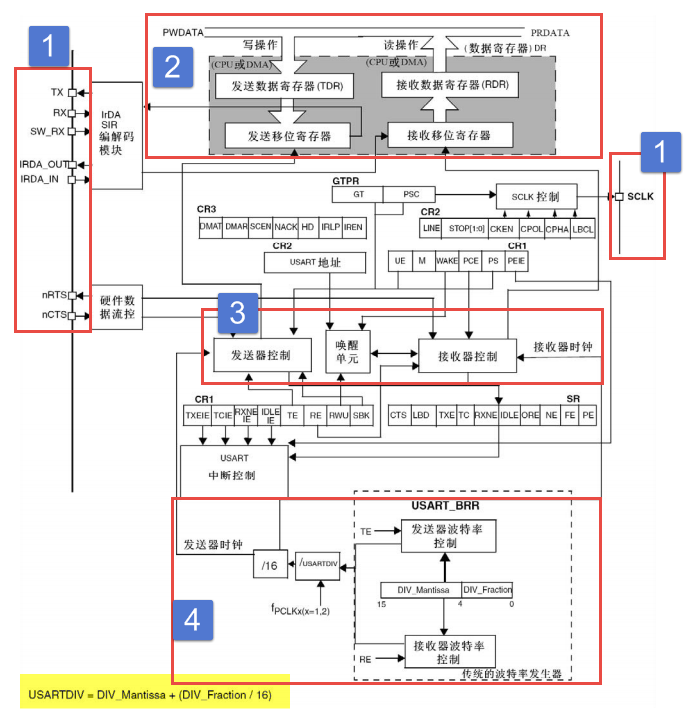
TX:发送数据输出引脚。
RX:接收数据输入引脚。
SW_RX:数据接收引脚,只用于单线和智能卡模式,属于内部引脚,没有具体外部引脚。
nRTS:请求以发送(Request To Send),n表示低电平有效。如果使能RTS流控制,当USART接收器准备好接收新数据时就会将nRTS变成低电平;当接收寄存器已满时,nRTS将被设置为高电平。该引脚只适用于硬件流控制。
nCTS:清除以发送(Clear To Send),n表示低电平有效。如果使能CTS流控制,发送器在发送下一帧数据之前会检测nCTS引脚,如果为低电平,表示可以发送数据,如果为高电平则在发送完当前数据帧之后停止发送。该引脚只适用于硬件流控制。
SCLK:发送器时钟输出引脚。这个引脚仅适用于同步模式。
STM32F103VET6芯片的USART引脚:
| 引脚 | APB2总线 | APB1总线 | |||
| USART1 | USART2 | USART3 | UART4 | UART5 | |
| TX | PA9 | PA2 | PB10 | PC10 | PC12 |
| RX | PA10 | PA3 | PB11 | PC11 | PD2 |
| SCLK | PA8 | PA4 | PB12 | ||
| nCTS | PA11 | PA0 | PB13 | ||
| nRTS | PA12 | PA1 | PB14 |
STM32F103VET6系统控制器有三个USART和两个UART,其中USART1和时钟来源于APB2总线时钟,其最大频率为72MHz,其他四个的时钟来源于APB1总线时钟,其最大频率为36MHz。UART只是异步传输功能,所以没有SCLK、nCTS和nRTS功能引脚。
数据寄存器
USART数据寄存器(USART_DR)只有低9位有效,并且第9位数据是否有效要取决于USART控制寄存器1(USART_CR1)的M位设置,当M位为0时表示8位数据字长,当M位为1表示9位数据字长,我们一般使用8位数据字长。
USART_DR包含了已发送的数据或者接收到的数据。USART_DR实际是包含了两个寄存器,一个专门用于发送的可写TDR,一个专门用于接收的可读RDR。当进行发送操作时,往USART_DR写入数据会自动存储在TDR内;当进行读取操作时,向USART_DR读取数据会自动提取RDR数据。
TDR和RDR都是介于系统总线和移位寄存器之间。串行通信是一个位一个位传输的,发送时把TDR内容转移到发送移位寄存器,然后把移位寄存器数据每一位发送出去,接收时把接收到的每一位顺序保存在接收移位寄存器内然后才转移到RDR。
代码配置流程
printf函数实现注意事项
要实现使用printf来输出一些数据的话,要避免半主机模式才能正常使用,避免半主机模式有以下两种方法
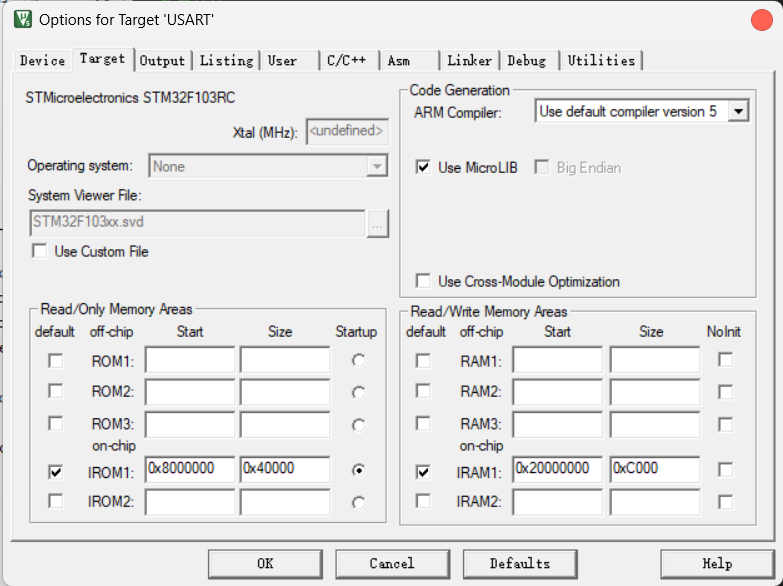
1.使用微库
2.代码法
添加以下代码就可以支持printf函数, 而不需要选择use MicroLIB
/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */
#if (__ARMCC_VERSION >= 6010050) /* 使用AC6编译器时 */
__asm(".global __use_no_semihosting\n\t"); /* 声明不使用半主机模式 */
__asm(".global __ARM_use_no_argv \n\t"); /* AC6下需要声明main函数为无参数格式,否则部分例程可能出现半主机模式 */
#else
/* 使用AC5编译器时, 要在这里定义__FILE 和 不使用半主机模式 */
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
/* Whatever you require here. If the only file you are using is */
/* standard output using printf() for debugging, no file handling */
/* is required. */
};
#endif
/* 不使用半主机模式,至少需要重定义_ttywrch\_sys_exit\_sys_command_string函数,以同时兼容AC6和AC5模式 */
int _ttywrch(int ch)
{
ch = ch;
return ch;
}
/* 定义_sys_exit()以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
char *_sys_command_string(char *cmd, int len)
{
return NULL;
}
/* FILE 在 stdio.h里面定义. */
FILE __stdout;
/******************************************************************************************/
写法一
USART/UART异步通信配置步骤
1.变量定义
uint8_t g_rx_buffer[1]; /* HAL库使用的串口接收数据缓冲区 */
uint8_t g_usart1_rx_flag = 0; /* 串口接收到数据标志 */
UART_HandleTypeDef g_uart1_handle; /* UART句柄 */2.配置串口工作参数
HAL_UART_Init()
void usart_init()
{
/*UART 初始化设置*/
g_uart1_handle.Instance = USART1; /* USART_UX */
g_uart1_handle.Init.BaudRate = 115200; /* 波特率 */
g_uart1_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
g_uart1_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
g_uart1_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
g_uart1_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
g_uart1_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&g_uart1_handle); /* HAL_UART_Init()会使能UART1 */
/* 该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量 */
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t*)g_rx_buffer, 1);
}3.串口底层初始化
HAL_UART_MspInit() 配置GPIO,NVIC,CLOCK等
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef gpio_init_struct;
if (huart->Instance == USART1) /* 如果是串口1,进行串口1 MSP初始化 */
{
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
gpio_init_struct.Pin = GPIO_PIN_9;
gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 推挽式复用输出 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* IO速度设置为高速 */
HAL_GPIO_Init(GPIOA, &gpio_init_struct); /* 初始化串口1的TX引脚 */
gpio_init_struct.Pin = GPIO_PIN_10;
gpio_init_struct.Mode = GPIO_MODE_AF_INPUT; /* 输入 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
HAL_GPIO_Init(GPIOA, &gpio_init_struct); /* 初始化串口1的RX引脚 */
HAL_NVIC_SetPriority(USART1_IRQn, 3, 3);
HAL_NVIC_EnableIRQ(USART1_IRQn);
}
}4.编写中断函数
USARTx_IRQHandler(),UARTx_IRQHandler()
/* 串口1中断服务函数 */
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&g_uart1_handle);
HAL_UART_Receive_IT(&g_uart1_handle, (uint8_t*)g_rx_buffer, 1);/*因为HAL_UART_IRQHandler会失能接收中断*/
}
/* 串口数据接收完成回调函数 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
g_usart1_rx_flag = 1;
}
}5.重定义fputc函数
USART_DR,HAL_UART_Transmit()
int fputc(int ch, FILE *f)
{
while ((USART_UX->SR & 0X40) == 0); /* 等待上一个字符发送完成 */
USART_UX->DR = (uint8_t)ch; /* 将要发送的字符 ch 写入到DR寄存器 */
return ch;
}其它方法定义printf,scanf
//自定义输出函数
void Usart_SendString(uint8_t *str)
{
unsigned int k=0;
do
{
HAL_UART_Transmit(&g_uart1_handle,(uint8_t *)(str + k) ,1,1000);
k++;
} while(*(str + k)!='\0');
}
//重定向c库函数printf到串口DEBUG_USART,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口DEBUG_USART */
HAL_UART_Transmit(&g_uart1_handle, (uint8_t *)&ch, 1, 1000);
return (ch);
}
//重定向c库函数scanf到串口DEBUG_USART,重写向后可使用scanf、getchar等函数,需要关闭中断使用
int fgetc(FILE *f)
{
int ch;
HAL_UART_Receive(&g_uart1_handle, (uint8_t *)&ch, 1, 1000);
return (ch);
}
Comments 1 条评论